Szakdolgozat, bekötve és leadva El is készült a bekötése a szakdolgozatomnak. A cím, mint azt korábban is írtam „Gráf-alapú Egyidejű Lokalizáció és Térképezés”...
Szakdolgozat projekt újabb bemutató videó Még karácsony előtt lőttünk pár új jelenetet a szakdolgozat projektben. Az egyik jobban sikerült jelenetből összeállítottam az alábbi kis...
TDK első helyezés és a szakdolgozat projekt Megkaptuk az első helyezést a projektünkre a 2015 őszi Tudományos Diákköri Konferencián. Mint azt már korábban is írtam, a projekten ketten...
Egy újabb (fél)év, egy újabb TDK Megtartottuk a második előadásunkat is a Tudományos Diákköri Konferencián. A projekt ugyanaz mint tavaly, ami egyben a szakdolgozat projektünk is...
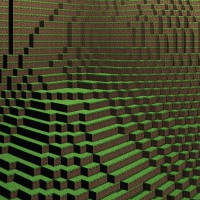
Volt egyszer egy TDK konferencia Nos, ezt szépen összehoztuk Takács Dániel kolléga Úrral. A téma a szakirányos projektünk volt, az útvonalkeresés és térképezés Kinect kamera...
Egyetemi projektek Az elektronikás projektek most jegelve vannak az egyetemi félév idejére, de az egyetem kapcsán is jó sok érdekes feladat van. Köztük a robotika...
FEZ Spider: Space Invaders Gondoltam megtöröm itt kicsit a csendet. A rendes nagy projektjeim még váratnak magukra, nyárig garantáltan nem lesz rájuk egy percem se, pedig nagy...
VEP verseny Az utóbbi időben ezerrel dolgoztam a sulis és egyéb projektjeimen, ezek közül szeretnék bemutatni egyet az előbbiek közül: Codename Z: Incomplete...